雷志荣 赵超 秦玮 左玲
摘 要:在分析目前国内外主流垂直起降固定翼无人机近况的基础上,为解决复合翼类垂直起降无人机的固有缺点,设计了一种新型鸭式布局尾座式垂直起降固定翼无人机。该无人机将四旋翼和固定翼无人机相结合,通过优化无人机气动方案、飞控系统选型、设计控制方案,尤其是在详细研究了旋翼模式与固定翼模式相互转换的控制方案后,完成无人机建模及控制律仿真并进行了科研试飞。试飞结果表明,本文提出的尾座式无人机在保留复合翼类无人机优点的同时,避开了其固有的缺点,可作为垂直起降类无人机的研究方向继续深入研究。
关键词:尾座式;垂直起降;鸭翼;模态转换;飞行控制;无人机
中图分类号:TJ765;V279
文献标识码:A
文章编号:1673-5048(2020)06-0043-06
0 引 言
近年來,随着无人机技术的发展,垂直起降固定翼无人机凭借自身的特点吸引了国内外众多科研机构、商业公司进行深入的研究[1-7]。其融合了旋翼类无人机和传统固定翼无人机的优点。旋翼模式下无需固定的起降场地,对飞行条件要求低,可实现垂直起降、稳定悬停,具有良好的低速飞行能力;固定翼模式下飞行速度快、航程远、飞行包线较旋翼类无人机优势明显。基于以上特点,垂直起降固定翼无人机可部署在地理环境复杂,任务要求高的场景中,具有广泛的应用前景。
目前常见的垂直起降固定翼无人机一般可分为推力换向式(Convertiplane)、嵌入升力风扇式(Fan-in-wing)和尾座式(Tail-sitter)。典型代表有:贝尔与波音直升机公司推力换向类的Eagle eye;西科斯基嵌入升力风扇类的 CypherⅡ;伯明翰大学和 MLB 公司的 V-bat 尾座式无人机。
近几年,多旋翼类无人机因开源飞控的出现,且其机体结构简单、成本低,异军突起,已成为小型旋翼类无人机的主流,应用于管道巡线、喷洒农药、航拍航测等多个领域。但多旋翼类无人机航时短,飞行速度低,属于低、慢、小类飞行器。在此种条件下,嵌入升力风扇式无人机创新地将传统的四旋翼系统与固定翼无人机相结合,逐渐发展为一类流行的垂直起降固定翼无人机——复合翼无人机[8-9]。与传统的垂直起降固定翼无人机相比,复合翼无人机具有结构简单,机体设计无特殊要求;四旋翼控制简单,技术成熟,可靠性高;旋翼与固定翼模式转换简单,控制难度低等优点。
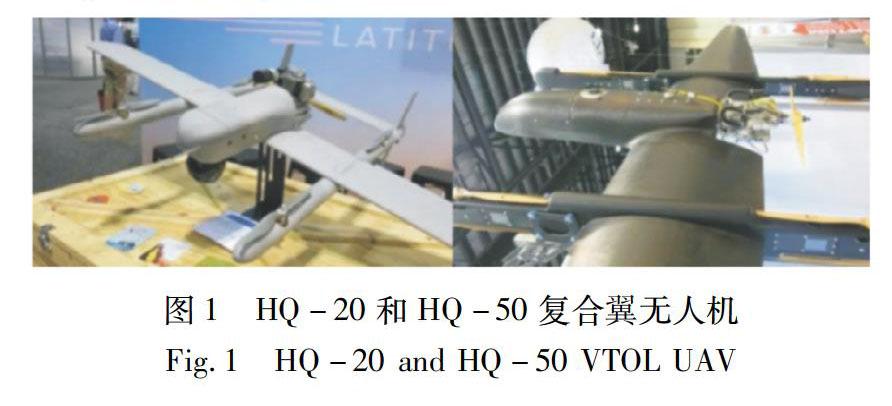
复合翼无人机在国内外得到快速发展。美国Latitude Engineering LLC公司是目前世界上复合四旋翼技术的领先者,已成功研制出多种复合翼无人机,如HQ-20,HQ-50等,如图1所示。
国内的垂直起降固定翼无人机以复合翼无人机为主。随着复合翼无人机的快速发展,复合翼无人机所带来的缺点也越来越明显。由于复合翼无人机是在固定翼飞机机体上直接加装四旋翼系统,造成机身废重大、增加飞行中阻力,废重和阻力的增加进而会减少续航时间。
加装四旋翼系统后,四旋翼系统恶化了无人机的重量特性,固定翼飞行阶段会影响无人机的气动性能,造成控制能力下降。如何减少上述复合翼无人机的缺点成为新型垂直起降无人机的关键指标。
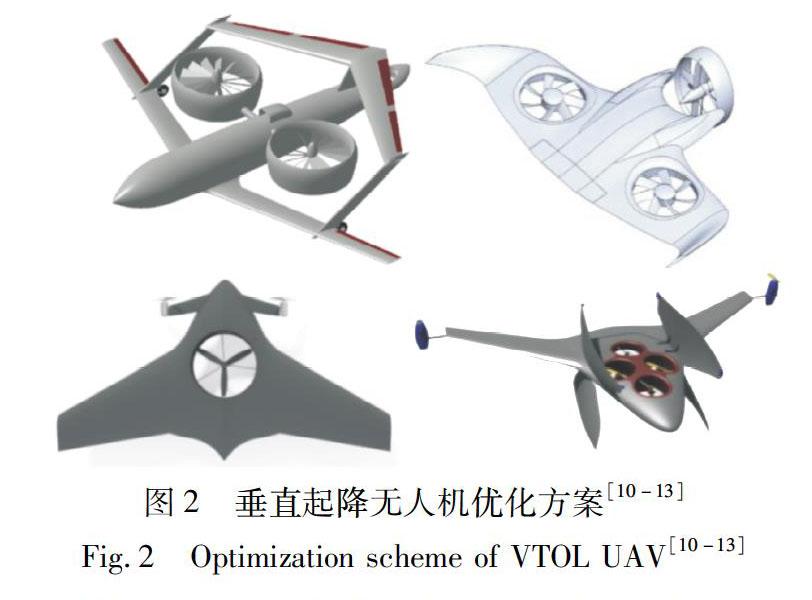
为了提高复合翼类垂直起降的性能,国内外研究人员提出新的气动构型,如图2所示。但目前未见有可实际使用的工程化产品。
尾座式无人机可作为一种有效方案,但其最大的缺点是飞行中控制难度大。借鉴复合翼无人机的思路,本文提出将尾座式无人机与四旋翼无人机相结合,设计一种新的尾座式无人机。与复合翼无人机相比,该方案的优点有:(1)结构件减少,纯电动力飞行时可减少一套动力装置,有效减少废重,增加续航时间。(2)飞机结构基本无改变,气动影响小;四个电机可智能工作,旋翼状态时四个电机同时工作,固定翼模式下仅使用机翼两个电机,另外两个电机处于热备份状态,可根据需求,实时参与综合控制。
为了增加俯仰轴的控制能力,机体考虑采用鸭式布局来提高控制效果。对于此种小型固定翼无人机,为增大无人机的升阻比,增加鸭翼控制面成为了一种理想的选择[13]。采用鸭翼布局,可有效增加无人机的升力,增强了俯仰轴的控制能力,提高巡航速度、延长飞行时间。同时减少副翼舵面的使用,给横滚通道留出了足够的控制余量,大大增强了无人机空中受扰时的安全性。
尾座式无人机飞行时要经历垂直起飞、转平飞、固定翼飞行、拉起、着陆等不同的飞行阶段。转平飞和拉起是尾座式无人机特有的飞行阶段。该阶段无人机状态变化较大,俯仰角可经历90°的大姿态变化,气动特性复杂,极大增加了控制律设计的复杂度[14]。而综合四旋翼及鸭翼的尾座式垂直起降无人机,由于气动性能的提高以及四旋翼出色的稳定控制能力,可有效减少控制律的设计难度,从而提高无人机系统的稳定性和安全性。
1 10 kg尾座式垂直起降固定翼无人机系统
通过选取无人机指标、初步设计无人机外形方案后,试制一款起飞重量10 kg纯电动尾座式垂直起降固定翼无人机。该无人机具有军民两用、航时长的特点。其采用纯电动力,操作简单、背包式设计、轻便易携,适合单人/单兵携带、环境适应能力强,可作为便携式无人机的首选。
1.1 无人机平台
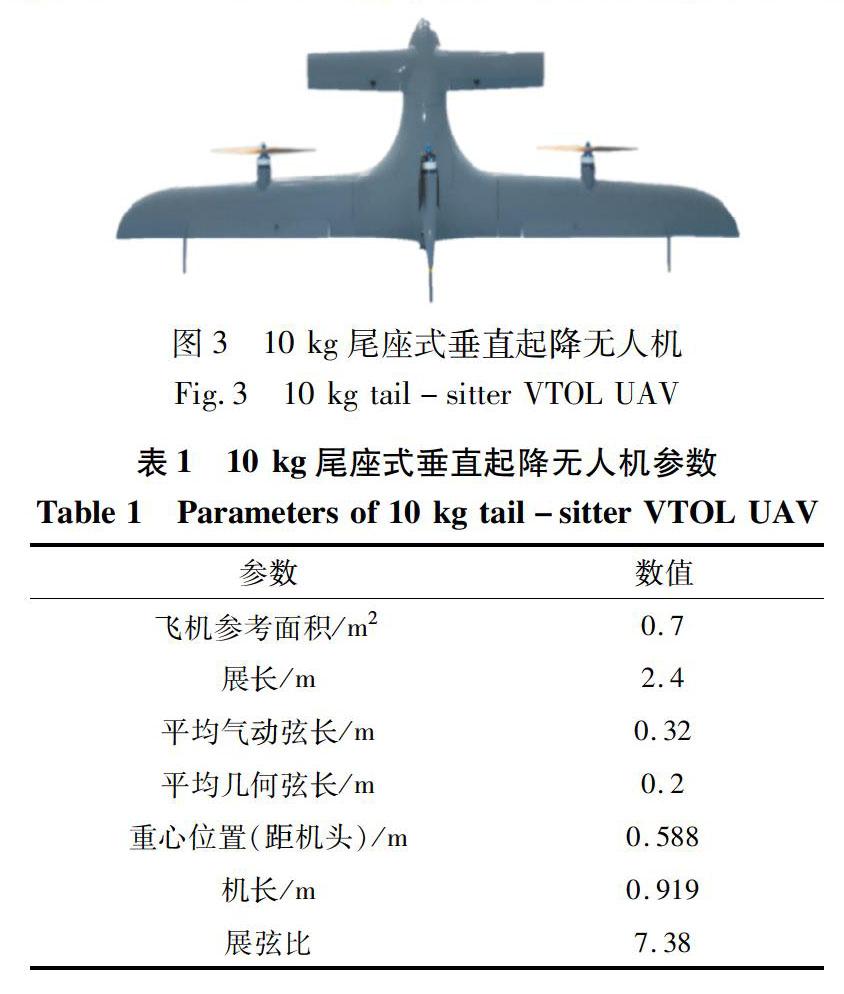
无人机外形方案确定后,经过多轮CFD仿真计算,对无人机外形进行适当修正,最终生产完成的10 kg尾座式垂直起降固定翼无人机如图3所示。其采用鸭翼结构,有效提高了俯仰通道的控制能力,同时可增加横滚通道舵面的控制能力,有利于无人机的稳定飞行,主要参数如表1所示。巡航速度为20 m/s,最大马赫数为0.1,飞行高度2 500 m,最大升阻比约为10,失速迎角约为18°。
1.2 AF813飞控系统
AF813小型无人机飞控系统是一款面向多行业、可适应不同无人机的工业级飞控产品。该产品主要传感器为双余度设计,结构相较传统的无人机飞控系统简单、便于安装、飞行控制效果好。该飞控系统的组成如下:
(1) 主控:内部集成STM32F407处理器、蓝牙、MEMS陀螺/加速度计/气压计,运行FreeRTOS,支持Simulink自动代码生成,可完成系统调度、控制律/制导律解算、输入输出管理、飞参存储等功能。
(2) IMU:内部集成工業级陀螺/加速度计/气压计,可完成导航及姿态解算。
(3) GPS天线:内部集成了STM32F106处理器、GPS芯片/天线、MEMS磁力计,可完成GPS和磁场信息获取。
(4) 数据链:采用Microhard的P840系列工业产品,具有信号稳定、传输距离远的特点。
该飞控系统已在小型直升机、多旋翼、固定翼无人机等多类型、多平台上应用多年,软硬件系统稳定可靠,可作为10 kg尾座式垂直起降固定翼无人机的飞行控制系统搭载使用。
2 飞行控制方案
尾座式垂直起降固定翼无人机放置在地面准备飞行时,机头向上、机尾向下。无人机飞行时的典型飞行阶段如图4所示。
垂直起飞,此阶段为旋翼控制阶段,无人机按照指令高度自动起飞;垂平转换,起飞到达指令高度后,无人机低头加速,实现旋翼模式向固定翼模式的转换,旋翼控制与固定翼控制共同作用的综合控制;航线飞行,此阶段为固定翼航线飞行阶段,旋翼控制转为监控状态;平垂转换,此阶段无人机将在固定翼模式下,控制无人机抬头,飞机拉起,通过旋翼与固定翼综合控制将无人机由固定翼模式转换为旋翼模式;定点着陆,平垂过渡完成后,无人机以旋翼模式飞向着陆点,完成定点着陆。
针对上述典型任务阶段,结合制导控制要求,本文设计无人机控制方案应实现如下功能:
(1) 旋翼模式下具备人工操作与各种稳定控制模态的无缝结合,实现无忧操纵。
(2) 固定翼具有人工操纵(姿态模式)模式。
(3) 固定翼航线飞行中可利用自动驾驶仪模态完成航线稳定飞行。
(4) 空中飞行过程中,固定翼模式和旋翼模式具备一键切换功能。
依据控制方案,尾座式垂直起降固定翼无人机控制部分可分为旋翼控制、固定翼控制、模式转换三个部分。
2.1 旋翼控制
旋翼模式主要在人工飞行(旋翼模式)、起飞、垂平转换、平垂转换、着陆阶段使用。选用朗宇电机,具有高KV值、拉力大的特点,每个电机最大可提供5.0 kg的拉力,可有效保证试飞验证阶段的飞行安全。4个电机旋转方向如图5所示。
旋翼控制采用改进的PID控制策略[15]。与传统的PID控制相比,其结构简单,物理意义相对明确,参数整定容易,具有较强的鲁棒性。
无人机内回路姿态稳定控制包括俯仰、横滚、偏航三个通道,结构如图6所示。
无人机的外回路控制包括了位置控制和速度控制,控制结构如图7所示。
根据上述控制结构,设计了多种控制模态:(1)GPS姿态模式,无人机姿态指令为期望姿态角,同时具有位置保持(包括高度保持)功能;(2)自动起飞;(3)自动着陆;(4)速度保持,无人机可按照指令速度飞行;(5)航线模式,无人机可按照设计航线飞行。
2.2 固定翼控制
本方案涉及的垂直起降无人机在固定翼模式飞行时,其固定翼的控制方案与传统的固定翼无人机控制类似,根据实际的任务需求初步设计了以下控制模态:人工操纵(姿态模式)、速度保持、高度保持、航向保持、航线飞行。
2.3 模式转换
尾座式垂直起降固定翼无人机在模式转换阶段,俯仰角在很短时间内需要完成大角度机动,此过程中空速信号也处于不稳定状态。此阶段无人机的强非线性导致获取无人机的动力学模型极为困难,按照常规方法建立的数学模型存在较大误差,增加了此阶段控制器设计的难度。因此,如何设计控制方案保证无人机能够在旋翼和固定翼之间平稳、安全的转换,是此类无人机能否取得成功的关键。
尾座式垂直起降固定翼无人机的模式转换包括垂平转换和平垂转换。模式转换是尾座式无人机飞行最关键的阶段,因为整个阶段需要有足够的升力来支撑无人机的重量,所以需要精心设计俯仰姿态曲线。垂平转换阶段俯仰姿态指令可分为初始过渡阶段和最终过渡阶段。在初始过渡阶段,无人机俯仰姿态从悬停线性降低到低头阶段,该姿态的选择取决于无人机的失速迎角。当达到失速迎角时,可从旋翼模式切换到固定翼模式。而平垂转换阶段在结束前一直处于混合控制阶段,对俯仰姿态曲线的设计要求主要考察转换的快速性[16]。
综合以上分析,模式转换阶段的控制律采用姿态控制加高度控制的方案进行控制器的设计[17]。
2.3.1 垂平转换
垂平转换指无人机在起飞完成后由旋翼模式向固定翼模式转换的阶段,如图8所示。主要包括:
(1) 低头加速:在旋翼模式下,以无人机可稳定控制的最大俯仰角为期望值,利用旋翼模式控制无人机低头加速;该阶段为初始过渡阶段,其设计中间俯仰低头姿态为-40°。
(2) 混合控制:无人机在俯仰姿态以及前飞速度达到转换条件后,即可转换到混合控制阶段,此阶段无人机的速度已经产生部分升力,可综合利用旋翼控制和固定翼控制让无人机姿态改平,并持续加速到设计的巡航速度;该阶段转换条件设计为:速度大于15 m/s;高度大于30 m。
(3) 转换完成:在无人机姿态改平后且飞行速度达到巡航速度,并稳定飞行一段时间后,无人机旋翼模式退出,进入监控状态,无人机以固定翼模式继续飞行。
2.3.2 平垂转换
平垂转换指无人机返航结束后由固定翼模式向旋翼模式转换的阶段,如图9所示。主要包括:
(1) 转换准备:无人机在返航结束到达着陆航点前,进行减速、降高控制,防止平垂转换过于剧烈,增加系统的稳定性;通过转换准备,无人机速度应低于巡航速度而大于失速速度,高度降低至离地高度30 m。
(2) 混控拉起:达到转换条件后,无人机执行拉起动作,拉起时期望俯仰姿态角为0°(旋翼模式);此阶段采用旋翼控制与固定翼控制相结合的方式,可实现快速稳定拉起。
(3) 旋翼控制:拉起完成后,固定翼模式退出,由旋翼模式继续控制无人机稳定飞行。
(4) 转换完成:无人机姿态角、速度达到转化指标。
(5) 定点着陆:转换完成后,无人机以旋翼模式飞向着陆点,执行定点着陆。
垂平转换和平垂转换过程充分考虑了旋翼模式的稳定控制能力,采用综合控制的理念,实现旋翼模式和固定翼模式之间的稳定可靠转换。
2.4 数学仿真
建立无人机的六自由度数学模型,如图10所示。本无人机属于传统构型,其力和力矩的计算按照CFD获取的无人机气动参数可直接进行计算。
无人机动力学方程:
绕无人机质心转动的动力学方程:
无人机质心的运动学方程:
建立绕无人机质心转动的运动学方程:
利用MATLAB搭建无人机数学模型,设计控制律。仿真条件:4个航路点,飞行速度25 m/s;航路点高度650 m;起飞高度550 m。仿真结果如图11~13所示。
垂平转换过程中,设定旋翼模式的俯仰角指令为-40°,无人机低头加速飞行。在姿态角达到期望指令后,设定15°的固定翼俯仰角指令,利用混合控制模式继續控制无人机低头,转换过程约5.4 s。平垂转换过程中,无人机固定翼俯仰角按照无人机拉起性能设计抬头角速度,采用混合控制模式快速控制无人机拉起。在旋翼模式俯仰角大于-10°后,固定翼模式退出,无人机切换至旋翼控制,转换过程约3.5 s。结果表明,该方案模式转换阶段无人机姿态可跟踪期望指令,完成稳定飞行。
3 试飞验证
试飞条件:4个航路点,飞行速度25 m/s,飞行高度500 m。某次外场试飞的飞行数据如图14~15所示。
垂平转换阶段,无人机旋翼俯仰角和固定翼俯仰角的变化趋势一致,转换过程中姿态变化稳定,飞行速度线性增加,转换过程约7 s。与仿真相比较,实际飞行时无人机低头加速后有将近2 s的时间无俯仰角保持在40°,这是因为无人机速度未达到设定的转换条件。若去除该时间,转换时间与数学仿真基本一致。平垂转换阶段,无人机固定翼俯仰角快速线性拉起,飞行速度快速降低,转换过程约3.5 s,与垂平转换阶段相比,转换速度更快,这与该阶段无人机的任务属性和转换过程的气动特性有关。与数学仿真相比,转换时间一致。
另外,针对无人机的高度控制性能进行了多次试飞测试,结果如图16所示。该无人机高度控制精度高,具有良好的控制能力。
通过多次试飞验证,该尾座式垂直起降固定翼无人机系统能够实现起飞、模式转换、航线飞行、定点着陆的稳定飞行,验证了该方案的可行性和系统的稳定性。
4 结 论
本文无人机系统有效改善了复合翼无人机的缺点,为垂直起降固定翼无人机提供了一种新的解决方案。经过多次试飞,结果表明该构型无人机系统稳定可靠。后续将在以下几个方面展开进一步的研究工作。
(1) 继续优化无人机平台。该无人机平台初步验证了小型鸭式布局无人机飞行平台的可行性,但无人机的升阻比仍有进一步提升的空间,升阻比的提高将有效延长无人机续航时间。
(2)继续优化模式转换的控制方案。进一步研究从起飞阶段执行垂平转换和无人机拉起时的平垂转换,实现模式转换的智能控制,减少转换时间、拉起时的上冲高度,提升转换的稳定性。
(3) 尝试将四旋翼控制方案改为机身双电机控制,取消上下垂尾电机,降低无人机重量。
参考文献:
[1] 刘凯,叶赋晨.垂直起降飞行器的发展动态和趋势分析[J].航空工程进展,2015,6(2):127-138.
Liu Kai,Ye Fuchen.Review and Analysis of Recent Developments for VTOL Vehicles[J].Advances in Aeronautical Science and Engineering,2015,6(2):127-138.(in Chinese)
[2] 于进勇,王超. 垂直起降无人机技术发展现状与展望[J].飞航导弹,2017(5):
37-42.
Yu Jinyong,Wang Chao.The Present Situation and Prospect of Technology Development of VTOL UAV [J].Aerodynamic Missile Journal,2017(5):37-42.(in Chinese)
[3] 何小九,李彦彬,朱枫,等. 国外垂直起降无人机发展现状及设计制造关键技术[J]. 飞航导弹,2016(6):22-27.
He Xiaojiu,Li Yanbin,Zhu Feng,et al.Development and Key Technology of Design and Manufacture of Foreign VTOL UAVs [J].Aerodynamic Missile Journal,2016(6):22-27.(in Chinese)
[4] 杨传广,马铁林,甘文彪,等. 垂直起降固定翼无人机技术特点浅析[C]∥中国航空科学技术大会,2017:56-61.
Yang Chuanguang,Ma Tielin,Gan Wenbiao,et al.Analysis on Technical Characteristics of VTOL Fixed-Wing UAV [C]∥China Aeronautical Science & Technology Conference,2017:56-61.(in Chinese)
[5] 朱海东. 新构型倾转四旋翼飞行器总体方案设计与研究[D].南京:南京航空航天大学,2015.
Zhu Haidong. Design and Research of the New Configuration Aircraft of Quarter Tilt-Rotor[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2015. (in Chinese)
[6] Kodera K,Miwa M.Development of Tailsitter VTOL Using Multi Rotor System[C] ∥The Proceedings of JSME Annual Conference on Robotics and Mechatronics,2017.
[7] 王波. 混合型可垂直起降飞行器技术研究[D].长沙:国防科学技术大学,2016.
Wang Bo. Research on Hybird Vertical Takeoff and Landing Aircrafts[D].Changsha:National University of Defense Technology,2016.(in Chinese)
[8] 文程祥. 小型四旋翼固定翼复合式无人机设计及控制研究[D]. 西安:长安大学,2017.
Wen Chengxiang. Research on Design a Small and Control for Quadplane[D].Xian:
Changan University,2017. (in Chinese)
[9] 张健. 复合翼垂直起降无人机飞行控制技术研究[D].厦门:厦门大学,2018.
Zhang Jian. Research on Control Technology of VTOL Fixed-Wing UAV[D].Xiamen:Xiamen University,2018. (in Chinese)
[10] Ma T L,Wang X S,Wei Z H,et al.Conceptual Design of a VTOL Box-Wing UAV with Rotatable Duct-Fans[C]∥ AIAA Scitech 2019 Forum,2019.
[11] Hoeveler B,Wolf C C,Raffel M,et al.Aerodynamic Study on Efficiency Improvement of a Wing Embedded Lifting Fan Remaining Open in Cruise Flight[C]∥ 2018 Applied Aerodynamics Conference,2018.
[12] Kaparos P,Bliamis C,Yakinthos K.Conceptual Design of a UAV with VTOL Characteristics∥AIAA Aviation 2019 Forum,2019.
[13] Footohi P,Bouskela A,Shkarayev S.Aerodynamic Design of Long-Range VTOL UAV[C]∥ AIAA Scitech 2019 Forum,2019.
[14] 劉玉焘. 尾座式无人机的飞行控制器设计[D].哈尔滨:哈尔滨工业大学,2014.
Liu Yutao. Design of Flight Controller for a Tail-Sitter UAV[D].Harbin:Harbin Institute of Technology,2014. (in Chinese)
[15] 雷志荣,宋栋梁,史龙,等. 基于PID的通用小型无人直升机控制方法[C]∥ 2018 IEEE/CSAA 导航、制导与控制会议,2018:2889-2893.
Lei Zhirong,Song Dongliang,Shi Long,et al.A PID-BasedControl Method for General Small Unmanned Helicopter [C]∥2018 IEEE/CSAA Guidance,Navigation and Control Conference,2018:2889-2893.(in Chinese)
[16] Swati S,Hardik P,Mangal K,et al.Biplane-Quadrotor Tail-Sitter UAV:Flight Dynamics and Control [J]. Journal of Gui-dance,Control,and Dynamics,2018,41(5):1049-1067.
[17] Yeo Y T,Liu H H.Transition Control of a Tilt-Rotor VTOL UAV [C]∥ 2018 AIAA Guidance,Navigation,and Control Conference,2018.
10 kg Tail-Sitter VTOL UAV System
Lei Zhirong1,2*,Zhao Chao2,Qin Wei2,Zuo Ling2
(1.School of Automation,Northwestern Polytechnical University,Xian 710072,China;
2.AVIC Xian Flight Automatic Control Research Institute,Xian 710065,China)
Abstract:Based on the analysis of the current status of VTOL UAVs at home and abroad,a new type of tail-sitter VTOL UAV with canard configuration and four rotors is proposed to avoid disadvantages of the quad-plane UAVs. Through optimizating aerodynamic design,selecting the flight control system,designing control method,especially discussing the conversion of rotor mode and the fixed-wing mode,the UAV modeling and control law simulation are completed,and the scientific research flight test is carried out. The flight results show that this type of UAV keeps the advantages of quad-plane UAV and avoids its inherent disadvantages. It can be further studied in the future as an important research direction of the VTOL UAVs.
Key words:tail-sitter;VTOL;canard wing;mode convert;flight control; UAV
收稿日期:2020-05-26
基金項目:国防科技重点实验室基金项目(WDZC2019601A105)
作者简介:雷志荣(1980-),男,陕西合阳人,高级工程师,研究方向是飞行控制。
*E-mail:kyj_37@163.com
猜你喜欢 无人机 高层火灾救援情境下的无人机外观设计研究工业设计(2020年10期)2020-11-30基于无人机的海滨景区绿潮监测价值工程(2020年30期)2020-11-09关于无人机航测系统外业像控的探讨科学与信息化(2020年29期)2020-10-26测绘工程无人机影像处理技术理论与创新(2020年15期)2020-10-09无人机倾斜摄影测量技术在复杂电力工程勘测中的应用理论与创新(2020年13期)2020-09-03长寿区水稻病虫害防治中植保无人机应用效果分析南方农业·上旬(2020年7期)2020-08-14浅谈无人机技术在林业生产中的应用农家科技下旬刊(2020年6期)2020-07-23无人机遥感技术在生态环境影响评价中的应用分析环境与发展(2020年5期)2020-06-26基于图像处理的无人机海上巡检救援研究科技创新导报(2020年6期)2020-06-11现阶段无人机武器化的应用锋绘(2020年2期)2020-05-26