孔令帅 段坷 姚瑶
摘 要:基于不同的高等级模拟机空中交通警告与防撞系统(Traffic Alert and Collision Avoidance System,TCAS)冲突训练科目,抽象出飞行过程中十种典型入侵飞机模型,模拟空中可能出现的交通冲突,建立入侵飞机方位、高度、速度等参数的通用仿真计算算法,实现入侵飞机的动态模拟,并解算入侵飞机经纬度、绝对高度等信息用于视景系统显示。建立应答机仿真模型,模拟通过应答机询问获取入侵飞机识别码及高度信息的过程,然后根据获取的入侵飞机的位置、高度等参数,推测最接近点(Closest Point of Approach,CPA)及到达最接近点的时间,结合本机当前飞行高度及TCAS灵敏度,实现入侵目标威胁等级判断。当出现决策建议(Resolution Advisory,RA)级别冲突时,解脱决策算法给出解脱建议,最终输出入侵目标的信息和冲突解脱决策到指示记录系统仿真界面,实现交通信息提示和解脱建议的显示。经验证,仿真模型正确模拟机载TCAS系统工作逻辑,入侵目标的仿真计算可有效模拟空中出现的交通冲突、威胁等级判断及解脱建议算法,可满足模拟训练要求。
关键词:高等级模拟机;TCAS仿真;入侵目标仿真;威胁等级判断;解脱建议
中图分类号:V328
文献标识码:A
文章编号:1673-5048(2020)06-0097-06
0 引 言
随着空中航路越来越繁忙,空中交通出现冲突的情况越来越多。为保障飞行安全,空中交通警告与防撞系统(TCAS)的作用越发重要[1-2]。TCAS是民用客机的重要组成部分,通过询问空中附近飞机的交通状况,识别和预测潜在撞击的危险[1,3-4]。当发生交通冲突时,触发垂直速度指令,以避免相撞,同时产生视觉和听觉的警告信息,并将这些信息提供给座舱显示和语音系统[5]。飞行员在实际飞行中不可能有练习使用 TCAS 的机会[6],因此,在模拟机上和其他仿真训练系统上进行TCAS训练就显得很重要。在高等级模拟机(C级/D级)中,TCAS训练已成为固定的训练科目[7]。因此,在高等级模拟机中,如何逼真地模拟空中交通环境以满足Traffic Advisory (TA)和Resolution Advisory(RA)决策训练至关重要。
本文针对高等级模拟机训练需求仿真空中交通环境,建立入侵飞机的数学模型,由综合控制台设置加载入侵飞机的命令,使其按照一定的方位、高度、速度接近本机,同时,通过软件仿真的方式模拟某型国产大型客机机载TCAS系统,模拟其不同工作模式,按照TCAS的避撞算法[8]解算入侵飞机的CPA距离、CPA时间、高度、方位,进而判断威胁级别及相应决策信息,并将入侵飞机参数和告警信息输出给指示记录系统仿真软件,实现交通信息显示。
1 系统组成及工作原理
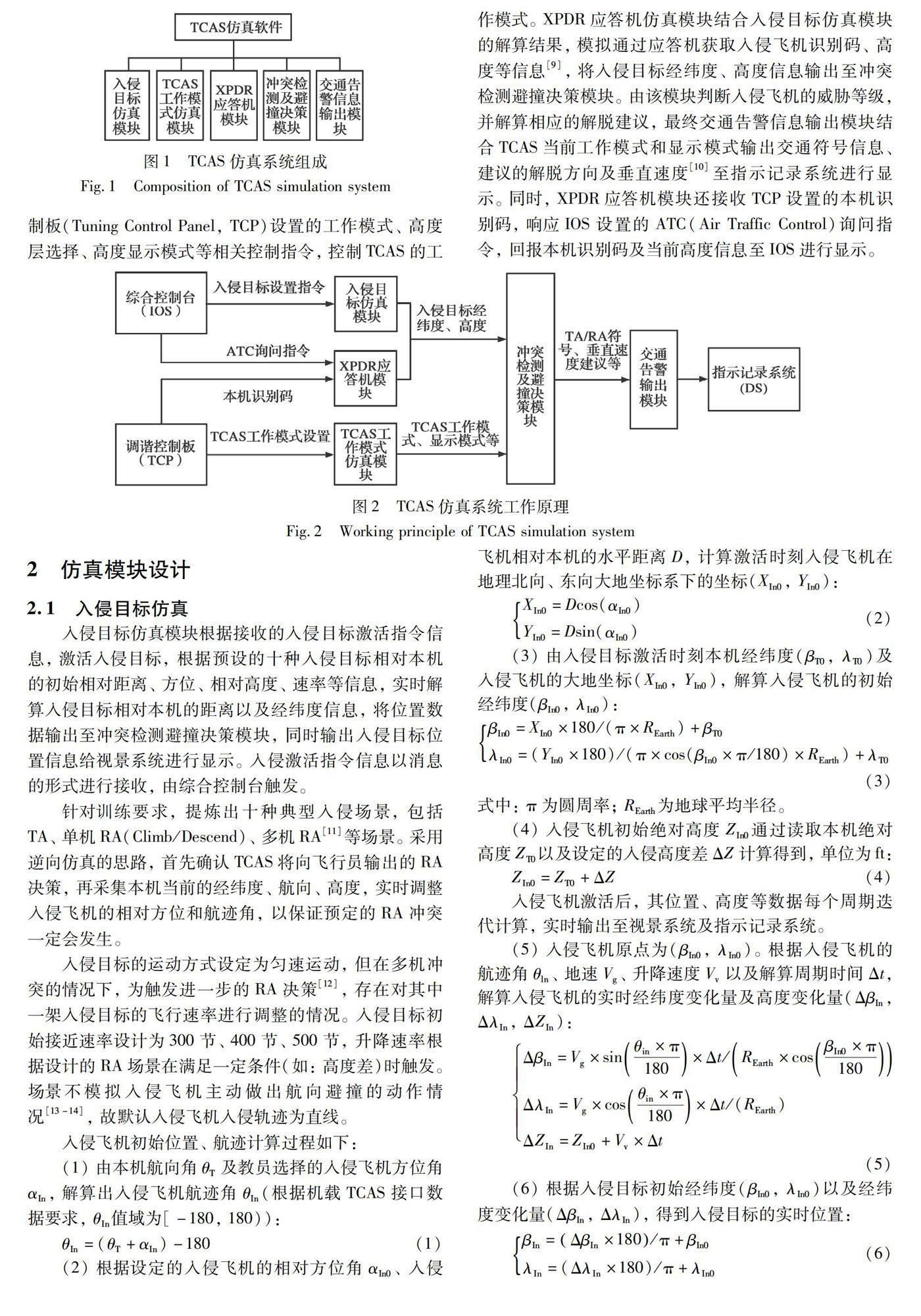
TCAS仿真软件分为入侵目标仿真模块、TCAS工作模式仿真模块、冲突检测及避撞决策模块、交通告警信息输出模块、Transponder(XPDR)应答机仿真模块。系统组成如图1所示。
TCAS仿真系统工作原理如图2所示。综合控制台(Instructor Operating Station,IOS)设置入侵目标的激活指令,由入侵目标仿真模块进行响应模拟解算场景中可能出现的入侵飞机。TCAS工作模式仿真模块接收调谐控制板(Tuning Control Panel,TCP)设置的工作模式、高度层选择、高度显示模式等相关控制指令,控制TCAS的工作模式。XPDR应答机仿真模块结合入侵目标仿真模块的解算结果,模拟通过应答机获取入侵飞机识别码、高度等信息[9],将入侵目标经纬度、高度信息输出至冲突检测避撞决策模块。由该模块判断入侵飞机的威胁等级,并解算相应的解脱建议,最终交通告警信息输出模块结合TCAS当前工作模式和显示模式输出交通符号信息、建议的解脱方向及垂直速度[10]至指示记录系统进行显示。同时,XPDR应答机模块还接收TCP设置的本机识别码,响应IOS设置的ATC(Air Traffic Control)询问指令,回报本机识别码及当前高度信息至IOS进行显示。
2 仿真模块设计
2.1 入侵目标仿真
入侵目标仿真模块根据接收的入侵目标激活指令信息,激活入侵目标,根据预设的十种入侵目标相对本机的初始相对距离、方位、相对高度、速率等信息,实时解算入侵目标相對本机的距离以及经纬度信息,将位置数据输出至冲突检测避撞决策模块,同时输出入侵目标位置信息给视景系统进行显示。入侵激活指令信息以消息的形式进行接收,由综合控制台触发。
针对训练要求,提炼出十种典型入侵场景,包括TA、单机RA(Climb/Descend)、多机RA[11]等场景。采用逆向仿真的思路,首先确认TCAS将向飞行员输出的RA决策,再采集本机当前的经纬度、航向、高度,实时调整入侵飞机的相对方位和航迹角,以保证预定的RA冲突一定会发生。
入侵目标的运动方式设定为匀速运动,但在多机冲突的情况下,为触发进一步的RA决策[12],存在对其中一架入侵目标的飞行速率进行调整的情况。入侵目标初始接近速率设计为300节、400节、500节,升降速率根据设计的RA场景在满足一定条件(如:高度差)时触发。场景不模拟入侵飞机主动做出航向避撞的动作情况[13-14],故默认入侵飞机入侵轨迹为直线。
入侵飞机初始位置、航迹计算过程如下:
(1) 由本机航向角θT及教员选择的入侵飞机方位角αIn,解算出入侵飞机航迹角θIn(根据机载TCAS接口数据要求,θIn值域为[-180,180)):
θIn=(θT+αIn)-180(1)
(2) 根据设定的入侵飞机的相对方位角αIn0、入侵飞机相对本机的水平距离D,计算激活时刻入侵飞机在地理北向、东向大地坐标系下的坐标(XIn0,YIn0):
XIn0=Dcos(αIn0)YIn0=Dsin(αIn0) (2)
(3) 由入侵目标激活时刻本机经纬度(βT0,λT0)及入侵飞机的大地坐标(XIn0,YIn0),解算入侵飞机的初始经纬度(βIn0,λIn0):
βIn0=XIn0×180/(π×REarth)+βT0λIn0=(YIn0×180)/(π×cos(βIn0×π/180)×REarth)+λT0 (3)
式中:π为圆周率;REarth为地球平均半径。
(4) 入侵飞机初始绝对高度ZIn0通过读取本机绝对高度ZT0以及设定的入侵高度差ΔZ计算得到,单位为ft:
ZIn0=ZT0+ΔZ(4)
入侵飞机激活后,其位置、高度等数据每个周期迭代计算,实时输出至视景系统及指示记录系统。
(5) 入侵飞机原点为(βIn0,λIn0)。根据入侵飞机的航迹角θln、地速Vg、升降速度Vv以及解算周期时间Δt,解算入侵飞机的实时经纬度变化量及高度变化量(ΔβIn,ΔλIn,ΔZIn):
ΔβIn=Vg×sinθin×π180×Δt/REarth×cosβIn0×π180
ΔλIn=Vg×cosθin×π180×Δt/(REarth)ΔZIn=ZIn0+Vv×Δt (5)
(6) 根据入侵目标初始经纬度(βIn0,λIn0)以及经纬度变化量(ΔβIn,ΔλIn),得到入侵目标的實时位置:
βIn=ΔβIn×180/π+βIn0λIn=(ΔλIn×180)/π+λIn0 (6)
除设定的TA/RA入侵场景外,在教员台上设定随机交通的触发,可更加逼真地模拟空中交通环境。随机交通的入侵目标设置的距本机距离、航迹、相对高度均较大,无法触发相应的TA/RA。当指示记录系统选择显示其他交通符号时,可显示在MAP页面中。
2.2 TCAS工作模式仿真
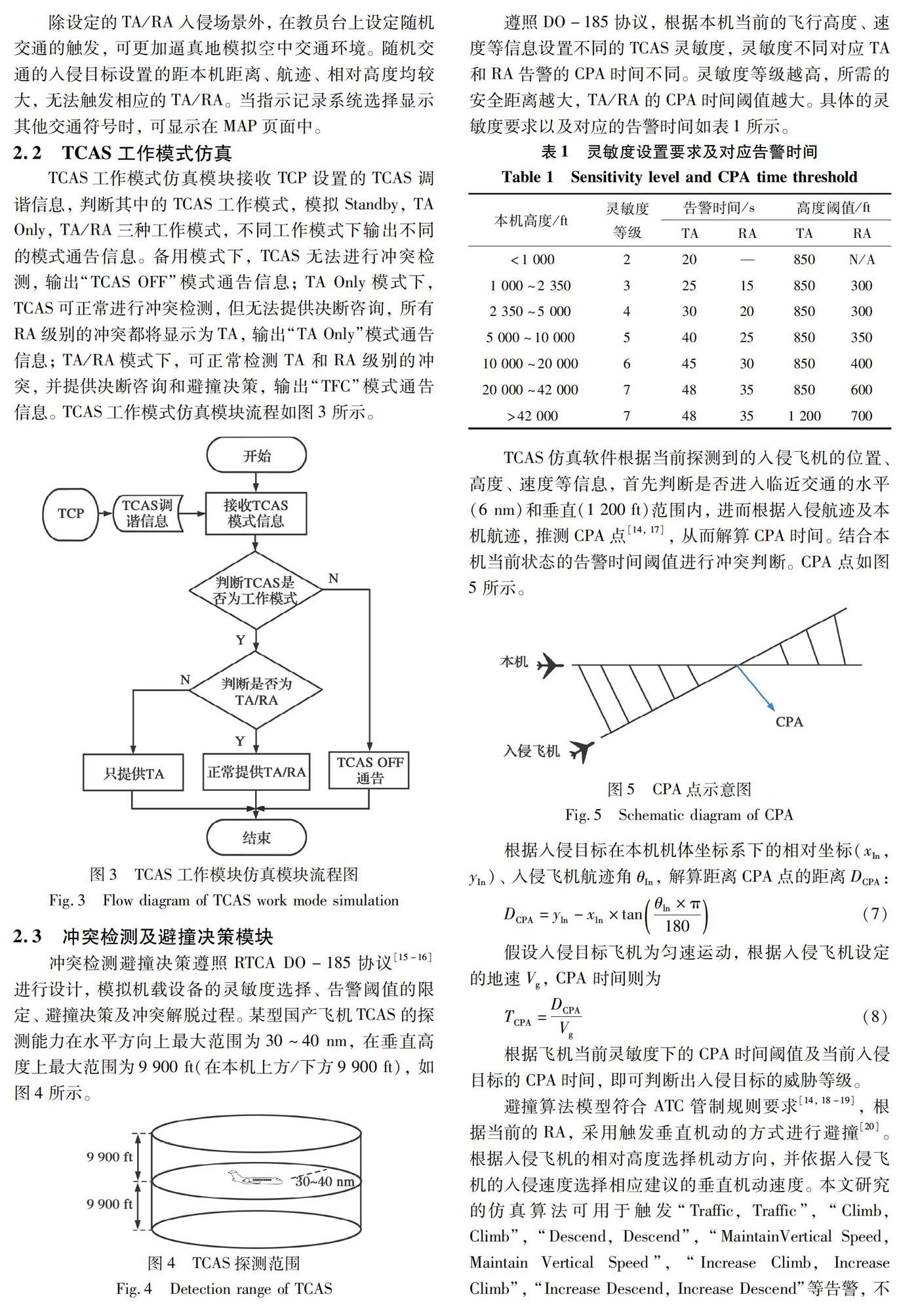
TCAS工作模式仿真模块接收TCP设置的TCAS调谐信息,判断其中的TCAS工作模式,模拟Standby,TA Only,TA/RA三种工作模式,不同工作模式下输出不同的模式通告信息。备用模式下,TCAS无法进行冲突检测,输出“TCAS OFF”模式通告信息;TA Only模式下,TCAS可正常进行冲突检测,但无法提供决断咨询,所有RA级别的冲突都将显示为TA,输出“TA Only”模式通告信息;TA/RA模式下,可正常检测TA和RA级别的冲突,并提供决断咨询和避撞决策,输出“TFC”模式通告信息。TCAS工作模式仿真模块流程如图3所示。
2.3 冲突检测及避撞决策模块
冲突检测避撞决策遵照RTCA DO-185协议[15-16]进行设计,模拟机载设备的灵敏度选择、告警阈值的限定、避撞决策及冲突解脱过程。某型国产飞机TCAS的探测能力在水平方向上最大范围为30~40 nm,在垂直高度上最大范围为9 900 ft(在本机上方/下方9 900 ft),如图4所示。
遵照DO-185协议,根据本机当前的飞行高度、速度等信息设置不同的TCAS灵敏度,灵敏度不同对应TA和RA告警的CPA时间不同。灵敏度等级越高,所需的安全距离越大,TA/RA的CPA时间阈值越大。具体的灵敏度要求以及对应的告警时间如表1所示。
TCAS仿真软件根据当前探测到的入侵飞机的位置、高度、速度等信息,首先判断是否进入临近交通的水平(6 nm)和垂直(1 200 ft)范围内,进而根据入侵航迹及本机航迹,推测CPA点[14,17],从而解算CPA时间。结合本机当前状态的告警时间阈值进行冲突判断。CPA点如图5所示。
根据入侵目标在本机机体坐标系下的相对坐标(xIn,yIn)、入侵飞机航迹角θIn,解算距离CPA点的距离DCPA:
DCPA=yln-xln×tanθln×π180(7)
假设入侵目标飞机为匀速运动,根据入侵飞机设定的地速Vg,CPA 时间则为
TCPA=DCPAVg(8)
根据飞机当前灵敏度下的CPA时间阈值及当前入侵目标的CPA时间,即可判断出入侵目标的威胁等级。
避撞算法模型符合ATC管制规则要求[14,18-19],根据当前的RA,采用触发垂直机动的方式进行避撞[20]。根据入侵飞机的相对高度选择机动方向,并依据入侵飞机的入侵速度选择相应建议的垂直机动速度。本文研究的仿真算法可用于触发“Traffic,Traffic”,“Climb,Climb”,“Descend,Descend”,“MaintainVertical Speed,Maintain Vertical Speed”,“Increase Climb,Increase Climb”,“Increase Descend,Increase Descend”等告警,不同决策下相应的垂直速度建议显示在PFD页面升降速度带上,用于指示飞行员垂直机动。
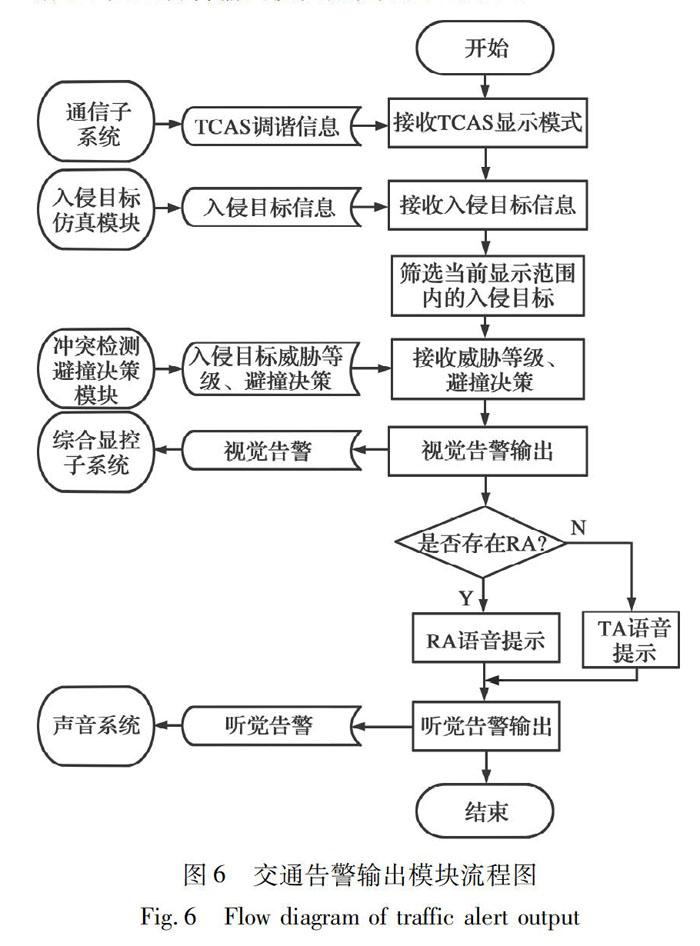
交通告警输出模块根据接收的TCAS调谐信息中的显示模式(ABOVE;NORMAL;BELOW)、高度显示模式(相对高度、绝对高度),筛选当前显示范围内的入侵目标,并根据威胁等级进行输出相应的告警信息至综合显控子系统,触发视觉告警。根据避撞指令输出相应语音标志给声音系统,触发听觉告警,并将建议的垂直速度输出给综合显控子系统,触发垂直速度带中的建议速度指示。交通告警输出模块流程如图6所示。
2.4 XPDR应答机模块
XPDR应答机模块接收TCAS调谐信息中的XPDR应答机工作模式(Standby,ALT REPORT OFF,XPDR),判断应答机工作状态。Standby模式下收发机为关闭状态,不回报消息。ALT REPORT OFF模式下只回报本机识别码。XPDR模式下回报本机识别码和当前高度信息[21-22]。
XPDR应答机模块模拟本机与入侵飞机的询问、问答过程以及本机与ATC的询问、问答过程。ATC询问指令由综合控制台进行模拟,通过综合控制台通信页面点击ATC询问按钮发送询问指令,XPDR应答机模块进行响应并发送回报消息,消息内容根据收发机工作状态而定。XPDR应答机模块工作流程如图7所示。
3 仿真结果
本文的入侵飞机仿真为动态仿真过程,通过IOS激活入侵飞机,并对解算的入侵飞机经纬度等参数进行了
记录以便进行仿真结果分析。IOS激活入侵飞机1,设定入侵飞机1的入侵相对方位为-30°,入侵飞机激活时刻本机航向为90°,入侵飞机解算的航迹与本机的位置关系如图8所示。图中红色点为本机位置,蓝色曲线为入侵飞机的经纬度所绘制的曲线。由图可知,仿真的入侵飞机1以预设的方位逐渐接近本机,可用于触发RA级别的交通告警。
IOS激活入侵飞机2,入侵飞机2的入侵相对方位为30°,入侵飞机激活时刻本机航向为90°,入侵飞机解算的航迹与本机的位置关系如图9所示。图中红色点为本机位置,蓝色曲线为入侵飞机的经纬度所绘制的曲线。由图可知,仿真的入侵飞机2以预设的方位逐渐接近本机,可用于触发RA级别的交通告警。
飞行模拟机中入侵目标的参数显示以及告警信息均通过指示记录系统画面进行显示,包含仿真的入侵飞机
方位、距离、威胁等级、相关告警和解脱决策信息等。指示记录系统显示采用仿真画面,显示元素及显示逻辑与某型国产大型飛机指示记录系统一致。系统间交联数据
参照该客机机载TCAS系统与指示记录系统接口进行设
计,包含TCAS模式通告、入侵目标方位、距离、高度、
升降速度、威胁等级、避撞决策信息等参数,TCAS模式通告、入侵目标信息显示在MAP页面上,避撞决策建议的垂直速度显示在PFD升降速度带上。
TCAS模式通告用于指示记录系统页面上显示TCAS的当前工作模式,包含TCAS OFF,TEST,TA ONLY,TFC。本文仿真结果验证时,设定TCAS工作模式为TA/RA模式,MAP页面左侧TCAS模式通告栏显示“TFC”模式通告信息,如图10所示。按照指示记录系统MAP页面选择的显示范围,输出显示范围内的入侵飞机信息,指示记录系统按照入侵飞机方位、距离,将入侵飞机符号显示在页面上的相应位置,并在相应符号上下显示相对高度。如果入侵飞机的升降速度较大(大于500 ft/min),则在符号一侧显示相应方向箭头。威胁等级分为四类:RA,TA,临近交通和其他交通,对应四种显示符号,RA级别威胁等级为红色实心方框,TA级别为黄色实心圆形,临近交通为白色实心菱形,其他交通为白色空心菱形。通过TCP调谐控制TCAS工作在正常模式,通过IOS设置入侵飞机1和入侵飞机2后,随着入侵飞机接近本机,解算出的入侵飞机的威胁等级逐渐上升。
进入RA范围内,入侵飞机1与入侵飞机2在MAP页面中均显示为红色实心方框(见图10),并且在右侧通告栏中用红色字体提示当前告警“TRAFFIC”以及入侵飞机1和入侵飞机2的信息。截图时刻入侵飞机1告警级别为RA,距离本机1.3 kn,高度为本机上方约300 ft,具备下降速率。入侵飞机2告警级别为RA,距离本机2.4 kn,高度为本机下方约300 ft,具备上升速率。
4 结 论
本文建立的TCAS仿真系统模型可有效模拟机载TCAS系统的工作逻辑和功能。建立的单机、多机入侵场景仿真模型及随机交通仿真模型,模拟了空中复杂的交通状态。冲突检测避撞算法模型可根据设置的入侵目标不同,输出不同的威胁等级判断信息,并根据当前场景输出正确告警及决策信息,可满足飞行训练中TCAS训练的要求。本文研究的冲突场景均为飞机巡航阶段可能出现的场景,针对高等级模拟机飞行训练,机场空域、起降过程中的交通冲突仿真有待后续研究。参照CAE等高等级模拟机中的TCAS仿真,可针对不同的训练机场和航线,实现特有起降过程中冲突场景数据录制、加载重现的功能,进一步逼真地模拟机场空域或起降过程中的冲突,丰富训练内容。
参考文献:
[1] 顾博. 民机空中交通防撞系统算法及仿真研究[D].上海:上海交通大学,2012.
Gu Bo.Study on the Algorithm of Civil Aircraft Traffic Collison Avoidance System and Simulation[D]. Shanghai:
Shanghai Jiao Tong University,2012.(in Chinese)
[2] 倪壮. 民机机载防撞系统算法研究与仿真[D].上海:上海交通大学,2015.
Ni Zhuang.Study on the Algorithm of Civil Aircraft TCAS and Simulation[D].Shanghai:
Shanghai Jiao Tong University,2015.(in Chinese)
[3] Pritchett A R,Fleming E S,Cleveland W P,et al.Pilots Information Use During TCAS Events,and Relationship to Compliance to TCAS Resolution Advisories[C]∥ Proceedings of the Human Factors and Ergonomics Society Annual Meeting,2012:
26-30.
[4] 徐超.机场侧向跑道运行碰撞风险研究[D].天津:中国民航大学,2019:
45-48.
Xu Chao.Research on Collision Risk of Airport Lateral Runways[D].Tianjin:
Civil Aviation University of China,2019:
45-48.(in Chinese)
[5] 张爱华. TCASⅡ避撞模型仿真技术研究[D].天津:中国民航大学,2018:
9-18.
Zhang Aihua.Research on the Simulation Technology of TCASII Collision Avoidance Model[D].Tianjin:
Civil Aviation University of China,2018:
9-18.(in Chinese)
[6] 苏彬,胡俊. 飞行仿真中的TCAS建模方法[J].计算机应用,2010,30(S1):
256-261.
Su Bin,Hu Jun.Modeling for Traffic Alert and Collision Avoidance System of Flight Simulation[J].Journal of Computer Applications,2010,30(S1):
256-261.(in Chinese)
[7] 付煒.飞行模拟机TCAS系统仿真软件设计与实现[D]. 北京:中国科学院大学,2015.
Fu Wei.Design and Implementation of Simulated TCAS Software on a Flight Simulator[D].Beijing:
University of Chinese Academy of Sciences,2015.(in Chinese)
[8] 李波,翟书颖,李茹,等.一种采用ADS-B 技术的通用航空防撞系统[J].电讯技术,2019,59(1):
19-26.
Li Bo,Zhai Shuying,Li Ru,et al.A Collision Avoidance System for General Aviation Based on ADS-B[J].Telecommunication Engineering,2019,59(1):
19-26.(in Chinese)
[9] 张思远,李仙颖,沈笑云.基于ADS-BIN的冲突预测与多机无冲突航迹规划[J]. 系统仿真学报,2019,31(8):
1627-1628.
Zhang Siyuan,Li Xianying,Shen Xiaoyun.ADS-BIN Based Conflict Prediction and Conflict-Free Trajectory Planning for Multi-Aircraft[J].Journal of System Simulation,2019,31(8):
1627-1628.(in Chinese)
[10] Sullivan B,Soukup P.The NASA 747-400 Flight Simulator-A National Resource for Aviation Safety Research[C]∥ Flight Simu-lation Technologies Conference,1996.
[11] 汤俊,朱峰,万宇,等. 基于状态预测的空中防撞系统多机避碰性能改进方法[J]. 系统仿真学报,2018,30(12):4703-4710.
Tang Jun,Zhu Feng,Wan Yu,et al.Collision Avoidance Performance Improvement for TCAS in Multi-Aircraft Situations Based on State Prediction[J].Journal of System Simulation,2018,30(12):
4703-4710. (in Chinese)
[12] Livadas C,Lygeros J,Lynch N A.High-Level Modeling and Analysis of the Traffic Alert and Collision Avoidance System (TCAS)[J].Proceedings of the IEEE,2000,88(7):926–948.
[13] Chen X,Wan Y,Lao S Y.Graphical Modeling and Simulation for a Multi-Aircraft Collision Avoidance Algorithm Based on Collaborative Decisions[J].Symmetry,2020,12(6):
985.
[14] Dehghan M,Sadeghiyan B,Khosravian E.Secure Multi-Party Collision Resolution Protocol for Air Traffic Control[J/OL].Journal of Intelligent and Fuzzy Systems,2020.DOI:
10. 3233/JIFS-190675.
[15] RTCA,Inc.STD. RTCA DO-185 Minimum Operational Perfor-mance Standards for Traffic Alert and Collision Avoidance System Airborne Equipment I (TCAS I)[S]. 1983.
[16] RTCA,Inc.Minimum Operational Performance Standards for Traffic Alert and Collision Avoidance System II (TCAS II):
RTCA DO-185B[S]. Version 7.1,Change 2,2013.
[17] Tang J,Zhu F,Piera M A.A Causal Encounter Model of Traffic Collision Avoidance System Operations for Safety Assessment and Advisory Optimization in High-Density Airspace[J].Transportation Research:
Part C,2018,96:
347-365.
[18] 牟奇鋒.空中交通管理中的防撞策略问题研究[D].成都:
西南交通大学,2010.
Mou Qifeng.Collision Prevention Strategy Problem Research in Air Traffic Management[D].Chengdu:
Southwest Jiaotong University,2010.(in Chinese)
[19] 丁腾跃.民机TCAS冲突算法及仿真系统研究[D].上海:
上海交通大学,2013.
Ding Tengyue.Study on the Algorithm and Simulation of Civil Aircraft Traffic Collisions Avoidance System[D].Shanghai:
Shanghai Jiao Tong University,2013.(in Chinese)
[20] Ulbig P,Müller D,Torens C,et al.Flight Simulator-Based Verification for Model-Based Avionics Applications on Multi-Core Targets[C]∥ 2019 AIAA Science and Technology Forum(SciTech),2019.
[21] Zhao P,Liu Y M,Ying L,et al.Multiple Aircraft Collision Avoidance Method Based on ADS-B System[C]∥AIAA Aviation Forum,2019.
[22] Julian K D,Kochenderfer M J,Owen M P.Deep Neural Network Compression for Aircraft Collision Avoidance Systems[J].Journal of Guidance,Control,and Dynamics,2019,42(3):
598-608.
Research on TCAS Simulation Technology of
High Level Flight Simulator
Kong Lingshuai*,Duan Ke,Yao Yao
(Bluesky Aviation Technology CO. LTD,Beijing 100085,China)
Abstract:
Based on different conflict training subjects of traffic alert and collision avoidance system(TCAS) of high level flight simulator,ten typical invading aircraft models during flight are abstracted to simulate possible traffic conflicts,and a general simulation calculation algorithm for intrusion bearing,position,altitude,speed and other parameters is utilized to realize the dynamic simulation of the intruders.Information such as the latitude,longitude,and absolute altitude of the intruder is calculated and used for visual system to display intruder aircraft in scene.Transponder simulation model is established to simulate the querying process getting the identification code and altitude of the intruders.Closest point of approach (CPA) and CPA time are calculated according to the position,altitude and other parameters of intruder,intruders threat level is judged considered on intruders altitude and TCAS sensitivity.When a resolution advisory (RA) level conflict occurs,the simulated resolution algorithm gives resolution advisory.Finally,the intruder information and TA/RA are outputted to simulation interface of indication system for displaying the traffic information and vertical resolution advisory.It is verified that the simulation model can simulate the working logic of airborne TCAS system,and the simulation of the intruder aircraft can effectively simulate the traffic conflicts which may occur in the air,the threat level judgment and the resolution advisory algorithm,which can meet the simulation training requirements.
Key words:
high level flight simulator; TCAS simulation; intruder simulation; threat level judgment; re-solution advisory
收稿日期:2020-05-25
作者简介:孔令帅(1989-),女,山东曲阜人,工程师,硕士,研究方向是飞机模拟机航空电子系统仿真技术。
E-mail:klsbuaa@163.com




