李兴智 刘逸涵 刘卫华 林清

【摘要】 介绍了一种针对有源的飞机双余度轮速传感器的轮速采集处理方法,通过对飞机双余度的轮速传感器供电电压和电流的范围判断实现轮速传感器供电检测,在轮速传感器无故障的前提下进行轮速信号采集,将轮速信号值换算为实际物理值,对轮速进行滤波和野点消除;结合飞机主轮载状态和飞机地速进行左主、左备、右主、右备轮速的状态监控和报故,最终实现轮速的选取。使用该方法,可有效提高刹车控制系统稳定性和可靠性。
【关键词】 双余度 轮速传感器 滤波
引言:
刹车控制[1]是飞机着陆滑跑分系统的核心控制环节;其功能是采集轮速传感器反馈的机轮转动信号、结合飞机状态和飞机系统指令调整刹车输出压力来实现飞机安全减速。机轮转动信号经计算转换和处理后变为机轮转动速度,简称轮速,轮速作为刹车控制的重要输入,影响到飞机减速过程的稳定和安全。余度设计在飞机系统的设计中十分普遍,合理有效的余度设计可提高产品安全性、任务可靠性和生存能力的重要设计方法。因此使用双余度轮速传感器進行轮速获取并采用合理可靠的轮速处理方法对飞机的安全刹车控制起到了至关重要的作用。
一、轮速传感器类型
轮速传感器是将飞机机轮的旋转量转换为可直接计量的信号量。转速测量常用的方式有光电式、电涡流式和电磁式等[4]。综合考虑价格、可靠性、抗干扰性等方面,电磁式轮速传感器具备优势较大,因此电磁式轮速信号的采集在汽车行业、飞机工业等方面应用较为广泛。电磁式轮速传感器可划分为有源轮速传感器和无源轮速传感器,顾名思义,有源轮速传感器需要外部提供电源供电方可正常工作,而无源轮速传感器则无需单独的电源供电。
本文中飞机上所采用的双余度轮速传感器则属于有源轮速传感器,因此本文中基于与双余度轮速传感器信号采集的防滑刹车控制中,轮速传感器[2]的故障可简单分为轮速传感供电故障和轮速传感器的信号故障,任何一个故障发生后均认为轮速传感器故障,在双余度飞机轮速采集处理过程中,刹车控制输入中使用的轮速则是依据轮速传感器的故障状态来确认轮速信号选取的。
二、轮速传感器供电检
双余度轮速采集是指在同一机轮上同时安装两个轮速传感器用来采集同一个轮速信号,以飞机两侧各一个机轮为例,在飞机每侧机轮各安装两个轮速传感器,安装在左机轮的轮速传感器分别为左主轮速传感器和左备轮速传感器,安装在右机轮的轮速传感器右主轮速传感器和右备轮速传感器。四个轮速传感器的为同型号的轮速传感器,其差别仅在于安装位置的不同,其结构、供电特性完全一致,因此四个轮速传感器的供电检测方法和检测内容一致。四个轮速传感器均安装有供电电压和供电电流的AD采集电路,针对轮速采集处理的处理器则会实时获取到各传感器的供电电压和电流的码值。因轮速传感器的型号差异,本文中轮速传感器的额定供电电压12V,供电电流范围为50mA~100mA的为例,具体检测内容和方法如下:
1.分别将AD采集端采集的左主轮速传感器、左备轮速传感器、右主轮速传感器和右备轮速传感器供电电压码值换算为实际电压值。
2.分别将AD采集端采集的左主轮速传感器、左备轮速传感器、右主轮速传感器和右备轮速传感器供电电流码值换算为实际电流值。
3.实时判断轮速传感器供电状态:如果轮速传感器供电小于11V或者大于13.0V或者电流不在[50,100]mA范围之内,则当前轮速传感器供电异常,否则,当前周期轮速传感器供电为正常状态。
4.轮速传感器供电故障判断:如果轮速传感器供电连续处于异常状态的时间大于200ms,则设置“当前轮速传感器供电状态”为故障。
5.按照a、b项的检测内容分别对左主轮速传感器、左备轮速传感器、右主轮速传感器和右备轮速传感器进行供电状态检测和故障记录。
轮速传感器供电状态实时进行监控,为排除噪声等偶发因素的干扰,轮速传感器故障判断必须进行滤波处理。
三、轮速的计算
轮速的计算是指将轮速传感器采集的信号量换算为飞机机轮旋转的实际物理量。根据机轮半径R、轮速传感器分辨率P(P脉冲/转)、传感器计数周期T(单位为ms)、采集的轮速完整波形个数n进行物理速度的换算和滤波[3]两项内容。其具体方法如下:
1.计算当前拍轮速:根据公式1进行计算得到工程量为km/h的轮速V;
(1)
2.滤波处理:对轮速采取平滑滤波方式滤波即取最近五个周期的轮速取平均值后得到当前轮速传感器采集的轮速。
四、轮速传感器的信号检测
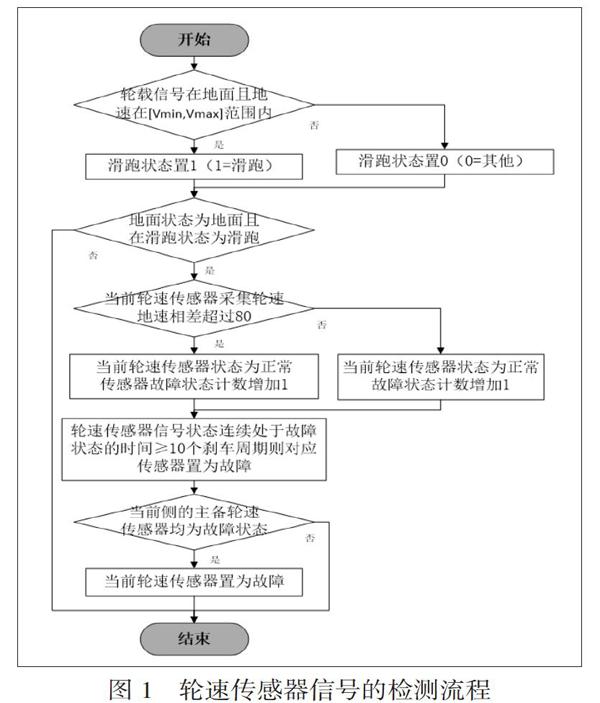
轮速传感器信号检测是一种结合飞机系统下发的飞机地速对轮速信号是否正常进行判断的一种检测方式,其检测是在地面且在滑跑状态下进行检测的,轮速传感器信号的检测方法如下:
1.地面状态判断:在左和右主轮载连续同时接地时间≥2.5s后,飞机为地面状态,否则为非地面状态。使用飞机状态数据中的左和右主轮载,若该信号无效,则设为接地(地面)状态;
2.滑跑状态判断:确定为地面状态时,飞机状态数据中的飞机地速在规定[Vmin,Vmax]范围内(不同飞机该范围不同)为滑跑状态;
3.飞机地速与轮速差值大于Vx(不同飞机差值)则当前周期轮速传感器信号状态为故障状态,否则,当前周期轮速传感器信号状态为正常状态;
4.如果左主轮速传感器信号状态连续处于故障状态的时间大于或等于10个刹车周期,则设置“左主轮速传感器故障”为故障状态;
5.如果左备轮速传感器信号状态连续处于故障状态的时间大于或等于个刹车周期,则设置“左备轮速传感器故障”为故障状态;
6.如果右主轮速传感器信号状态连续处于故障状态的时间大于或等于个刹车周期,则设置“右主轮速传感器故障”为故障状态;
7、如果右备轮速传感器信号状态连续处于故障状态的时间大于或等于个刹车周期,则设置“右备轮速传感器故障”为故障状态;
8、左主轮速传感器且左备轮速传感器故障则左主轮速传感器故障;
9、右主轮速传感器且右备轮速传感器故障则右主轮速传感器故障。
轮速传感器信号的检测流程如图1所示。
五、双余度轮速信号选取
双余度轮速信号选取的基本原则就是当某一轮速传感器故障后,若双余度设计中的另外一个轮速传感器在正常状态,则故障将不会影响刹车系统的运行。由于考虑到飞机刹车系统刹车频次低,单次刹车时间相对較长且可靠性要求较高,所以一旦确定某一轮速传感器故障后则认为该传感器永久故障,故障不可恢复。
作为防滑刹车控制的输入数据,轮速的选取主要是依照每个轮速传感器的故障装状态或者是轮速故障计数值选取的,设A、和B为飞机一侧的一个双余度轮速传感的两个轮速传感器单元,NA和NB分别为A和B两个轮速传感器单元的瞬时故障计数,Nmax为连续故障次数的门限(两个轮速传感器单元均无故障即认为NA和NB均未超过连续故障次数的门限Nmax,当NA或者NB超过故障次数门限Nmax后认为该轮速传感器单元发生故障),两个轮速传感器选取原则如下:
1.主和备轮速传感器均无故障(NA 2.主和备轮速传感器一个有故障(NA≥Nmax且NB 3、主和备轮速传感器均故障(NA≥Nmax且NB≥Nmax):向上位机上传发生轮速传感器故障信息。 六、结束语 本文针对一种基于有源轮速传感器的飞机双余度轮速传感器轮速采集方式开展研究,首先通过轮速传感器的供电检测和故障的连续确认后记录供电故障信息,然后将轮速信息换算为机轮速度后结合飞机地速信息进行信号检测,判断出轮速传感器的信号故障;最后结合所记录的各路传感器故障信息选取合适的轮速数据作为防滑刹车控制的轮速输入数据,使用该方法,可有效提高刹车控制系统稳定性和可靠性。 参考文献 [1] 张庆利,孔文秦,彭波,张涛,徐方舟.基于滑模变结构电驱动防滑刹车控制系统设计[J].高技术通讯,2019,29(3)257-265 [2] 李欣玉,梁品. 轮速传感器概述及可靠性测试方法研究[J].汽车电器,2016,(8)55-57 [3] 刘金龙,黄贤丞,轮速传感器类型及信号处理[J].传感器世界2018,24(20):20-25 [4] 厉朴 ,宋健,于良耀 . ABS 轮速信号抗干扰处理方法[J].汽车技术,2001( 5) :15 - 17. 李兴智(1984—) ,男,工程师。研究方向:计算机设计与应用。




