胡峥楠 佘锋


摘 要:局部路径规划是自动驾驶的基础研究领域,为了实现局部路径规划中备选轨迹的有效生成,提出了一种基于样条插值的局部路径规划的建模方法。针对局部路径规划的参考线生成,设计了基于樣条插值的参考线生成模型。并基于生成的参考线,进一步推导了备选轨迹的生成方法,从而为自动驾驶的控制决策规划功能的轨迹选择、避障分析等功能提供有效的数学分析基础。仿真结果验证,文中提出的参考线数学模型对不同的道路曲线形状具有较强的适应性和可实现性。同时,通过对路径规划的离散采样点使用了参数三次样条插值函数来拟合行驶参考线,保证参考线上点的曲率的连续性,并符合车辆的运动学特性。
关键词:无人驾驶;路径规划;样条插值;轨迹生成;参考线
中图分类号:TP391
文献标志码:A
文章编号:1007-757X(2020)11-0106-05
Abstract:Local path planning is the foundation field of research of automatic driving. In order to achieve the effective generation of alternative trajectory in local path planning, this paper proposes a modeling method of local path planning based on spline interpolation. For the local path planning, a reference line generation model based on spline interpolation is designed. Based on the generated reference line, the generation method of alternative trajectory is further derived, it provides an effective mathematical analysis basis for the trajectory selection, obstacle avoidance analysis and other functions of planning function of automatic driving. The simulation results show that the reference line mathematical model proposed in this paper has strong adaptability and feasibility for different road curve shapes. This paper also uses the parameter cubic spline interpolation function to fit the driving reference line through the discrete sampling points of the path planning, and this can ensure the curvature continuity of the reference line points, and meet the kinematic characteristics of the vehicle.
Key words:autopilot;path planning;spline interpolation;trajectory generation;line
0 引言
无人驾驶汽车技术包含感知融合、控制决策规划、高精度定位等多种技术。在无人驾驶智能车相关的多项关键技术中,规划技术是保障无人驾驶车辆安全行驶的关键技术环节。一般而言,路径规划的功能是为了实现在有障碍物的环境中,搜索出从给定起点到终点的优化行驶路径,使无人驾驶车辆在行驶过程中安全、可靠地绕过检测到的障碍物。在路径规划的设计中,主要解决无人驾驶车辆行驶过程中的两大问题—导航和避障。
根据规划范围,路径规划可分为全局路径规划与局部路径规划。全局路径规划从全局范围上为车辆规划出全局的行驶路径;局部路径规划指无人驾驶车辆通过自身携带的传感器获取周围的环境信息,并基于高精地图,使无人驾驶车辆获取一条安全无碰撞的最佳路线。相对于全局路径规划,局部路径规划主要基于对当前局部环境信息的感知,实时性地规划行驶路径。
局部路径规划算法的是在完成车道级的全局路径规划和行为决策的基础上,规划未来较短一段时间内车辆的行驶路径。算法最终将输出按时间等分的期望行驶轨迹离散点信息(包括位置、速度、航向角等)。
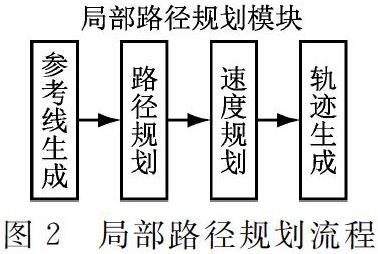
在局部路径规划中,参考线设计是规划路径形成与选择的基础。参考线的特征是:假设在没有障碍物的情况下,车辆沿车道行驶时的理想路径。一般而言,参考线理想路径只和车道的几何形状与交通规则有关。参考线可以在制作环境信息时测量确定,然后保存在高精度地图中,基于这种方式获取参考线是最为方便和准确的。但目前高精度地图信息和格式还没统一,有些高精度地图中仅保存了可以确定车道的若干个离散点的信息。因此,生成车辆行驶的参考线是局部路径规划的前提条件。在参考线的设计中,还需要考虑是否满足曲率特性和运动学特性。目前,如何设计参考线生成模型,仍然还是正在探索的问题。本文基于离散采样,对离散点使用了参数三次样条插值函数进行数学建模,并拟合行驶参考线,从而保证参考线上点的曲率连续性,并符合车辆的运动学特性。
1 样条插值轨迹生成算法
1.1 局部路径规划设计准则
联合式(11)-式(17),可得到关于4个未知参数的线性方程组,从而可以求解得到c0,c1,c2,c3。每个采样点对应一组解,基于每一组解,可以生成一条备选路径。
备选路径生成步骤如下。
2 仿真结果
为了验证样条插值参考线生成模型的效果,对平面坐标系下的不同形状进行了仿真验证,如图4所示。
图4(a)所示的圆为单位圆,圆心为(0,0),在圆上取16点等分个圆弧等分点时的插值样例;
图4(b)为平面坐标系下,边长为2的正方形,取图形周长上的8个等分点时的插值样例;图4(c)为平面坐标系下,边长为2的正方形,取图形周长上的16个等分点时的插值样例。从图4的结果可以看出,参数样条插值参考线生成模型对不同的图形具有较强的适用性,其对原始图形的拟合效果取决于采样点的选取,采样点越多拟合效果越好。在实际中,采样点数量的选择可以根据拟合精度需求来确定,如图5所示。
图5是在一条长约240米,宽6米的S型车道上,以沿参考系向前100米为终点位置,生成备选路径的样例图。其中图5(b)是图5(a)的放大图。图5中,展示了车辆处于三种不同初始状态的备选路径组,终点位置横向偏移的采样宽度均为0.5米。备选路径组A的初始位置设置为横向偏移为0、夹角为0度;备选路径组B的初始位置为横向偏移为1米、夹角为0度;备选路径组C的初始位置,横向偏移为0和夹角为-0.1(弧度制)。从图5可以看出,根据本文所提到的路径生成算法,可以生成完备的备用路径,为后续的曲率检验、避障规划和路径选择提供了良好的分析模型。
3 总结
为了有效地实施无人驾驶中的路径选择、避障评估与规划,本文基于样条插值函数的理论,设计参考线生成模型,并基于参考线的设计,进一步设计并分析了备选路径设计的方法。经仿真验证,本文提出的基于插值函数理论的参考线模型与备选路径生成的方法,对于不同的道路形状有较好的适应性,并具有较好的可实现性。同时,本文所提出的方法也建立了明确的数学模型,为局部路径规划的曲率分析、避障分析提供了良好的技术条件。
参考文献
[1] Werling M, Kammel S, Ziegler J, et al. Optimal trajectories for time-critical street scenarios using discretized terminal manifolds[J].The International Journal of Robotics Research, 2012,31(3):259-346.
[2] Lim W, Lee S, Sunwoo M, et al. Hierarchical trajectory planning of an autonomous car based on the integration of a sampling and an optimization method[J]. IEEE Transactions on Intelligent Transportation Systems, 2018,19(2):613-626.
[3] Li X, Sun Z, Cao D, et al. Real-Time Trajectory Planning for Autonomous Urban Driving:Framework, Algorithms, and Verifications[J]. IEEE/ASME Transactions on Mechatronics, 2016, 21(2):740-753.
[4] A.G. Cunningham, E. Galceran, R.M. Eustice, E. Olson. “Mpdm:driving,” in 2015 IEEE International Conference on Robotics and Automation(ICRA). IEEE, 2015, 1670-1677.
[5] Open DRIVE Format SpecRev1.5M:http://www.opendrive.org/,2019.
[6] 申澤邦,雍宾宾,周庆国,等. 无人驾驶原理与实践[M].北京:机械工业出版社,2019.
[7] 许小勇, 钟太勇. 三次样条插值函数的构造与Matlab实现[J]. 兵工自动化, 2006(11):76-78.
[8] 苏步青. 关于三次参数样条曲线的一些注记[J]. 应用数学学报, 1976(1):49-58.
[9] Werling M, Ziegler J, Kammel S, et al. Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame[C]// Robotics and Automation (ICRA), 2010 IEEE International Conference on. IEEE, 2010:987-993.
(收稿日期:2019.11.01)
猜你喜欢 路径规划无人驾驶 战“疫”需求急呼无人驾驶车冲上前线人民交通(2020年5期)2020-05-03基于避障空间的移动机器人路径规划的研究山东工业技术(2018年14期)2018-08-20基于改进RRT算法的AGV路径规划研究软件导刊(2018年3期)2018-03-26自主移动机器人路径规划方法研究综述软件导刊(2018年10期)2018-01-19实时路况下同城生鲜农产品配送路径优化江苏农业科学(2017年17期)2017-11-15北京第一条无人驾驶地铁试运行!你敢坐吗?科学大众(中学)(2017年3期)2017-07-06基于改进人工势场法的机器人避障方法的研究科技资讯(2017年4期)2017-04-23无人驾驶货船军事文摘·科学少年(2016年8期)2016-11-02移动机器人路径规划方法研究现代仪器与医疗(2015年5期)2015-10-21无人驾驶环球时报(2014-02-27)2014-02-27