张叶 任鸿翔 王德龙







摘要:为降低主观因素对船舶操纵评估结果的影响,提出一种基于K近邻(K-nearest neighbor, KNN)算法和多目标优化理论的船舶操纵智能评估模型。根据安全、平稳、高效的航行要求,建立这个模型的评价指标体系;采用变异系数法获得各评价指标的权重;根据评价指标提取对应特征值,构建未标记样本集;基于多目标优化理论建立评价指标目标函数,得到每个样本的成绩并排序,根据样本成绩构建标记样本集;利用KNN算法对待评估样本进行分类,得到本次操作的结果。利用C+ +语言开发船舶操纵智能评估系统,测试结果表明,系统评估结果与专家评估结果基本一致,能客观、准确实现船舶操纵自动评估。
关键词:
K近邻(KNN)算法; 船舶操纵评估; 智能评估系统; 航海模拟器; 评价指标
中图分类号:
U666.158 文献标志码:
A
Abstract:
In order to reduce the impact of subjective factors on ship maneuvering evaluation results, an intelligent evaluation model for ship maneuvering is put forward based on the K-nearest neighbor (KNN) algorithm and the multi-objective optimization theory. The evaluation index system of the model is established according to the safe, stable and efficient navigation requirements. The weights of evaluation indices are obtained by the coefficient of variation method. The unlabeled sample set is constructed by extracting relevant characteristic values according to evaluation indices. The evaluation index objective function is established based on the multi-objective optimization theory, the sample scores are obtained and sorted, and the labeled sample set is constructed based on the sample scores. The KNN algorithm is used to classify the samples to be evaluated and get the evaluation score. The C+ + language is used to develop the intelligent evaluation system for ship maneuvering. Test results show that the system evaluation results are basically consistent with the expert evaluation results. The system can objectively and accurately realize the automatic evaluation of ship maneuvering.
Key words:
K-nearest neighbor (KNN) algorithm; ship maneuvering evaluation; intelligent evaluation system; navigation simulator; evaluation index
0 引 言
STCW78/95公約马尼拉修正案将对船舶驾驶员采用船舶操纵模拟器进行训练和考核的要求列入了船员业务培训的范围。我国船员理论考试已实现上机考试,而船员操纵实操评估仍然采用评估员现场评估方式,评估工作量大[1],评估结果易受评估员主观因素影响。为实现船舶操纵的自动评估,国内外学者已经做了很多研究工作,如:陈锦标等[2]利用灰色模糊综合评价法建立了大型船舶操纵评估模型;薛满福等[3]利用模糊综合评价法建立了船舶靠离泊评估模型;王德龙等[4-5]构建了基于航海模拟器的船舶操纵和避碰自动评估系统;蒋效彬等[6]利用模糊综合评价法建立了船舶锚泊操纵评估模型,并初步实现了锚泊操纵自动评估系统的搭建;刘洋等[7]利用计算机模拟仿真技术实现了船舶操纵安全自动评估系统的开发;HUANG等[8]使用交叉线和蒙特卡洛方法对航道航行船舶进行安全性评估;DUAN等[9]提出了基于智能优化的人船资源系统模型和评估方法实现了船舶机舱操作自动评估;NAGI等[10]采用风险矩阵的方法对船舶操纵过程中的潜在危险进行评价。然而,目前国内对于航海模拟器中船舶操纵自动评估的评估规则设定仍需人工参与,评估结果易受评估员主观因素影响,导致不合理现象出现。因此有必要进一步深入研究船舶操纵评估理论,并开发出一套智能化、自动化的实操评估系统。一方面,可以检验海员掌握船舶操纵的理论知识及实操水平,促进海员船舶操纵水平的提高;另一方面,可以有效减少评估员主观因素对评估结果的影响,使评估结果更加客观、科学。
本文基于前人的研究,首先对操纵理论进行深入研究,建立合适的评价体系;其次,提出智能化评估模型,使评估模型具有自学习、自组织和自适应等特征;最后,基于航海模拟器开发船舶操纵智能评估系统,实现评估员出题、考生答题和智能评估等功能。
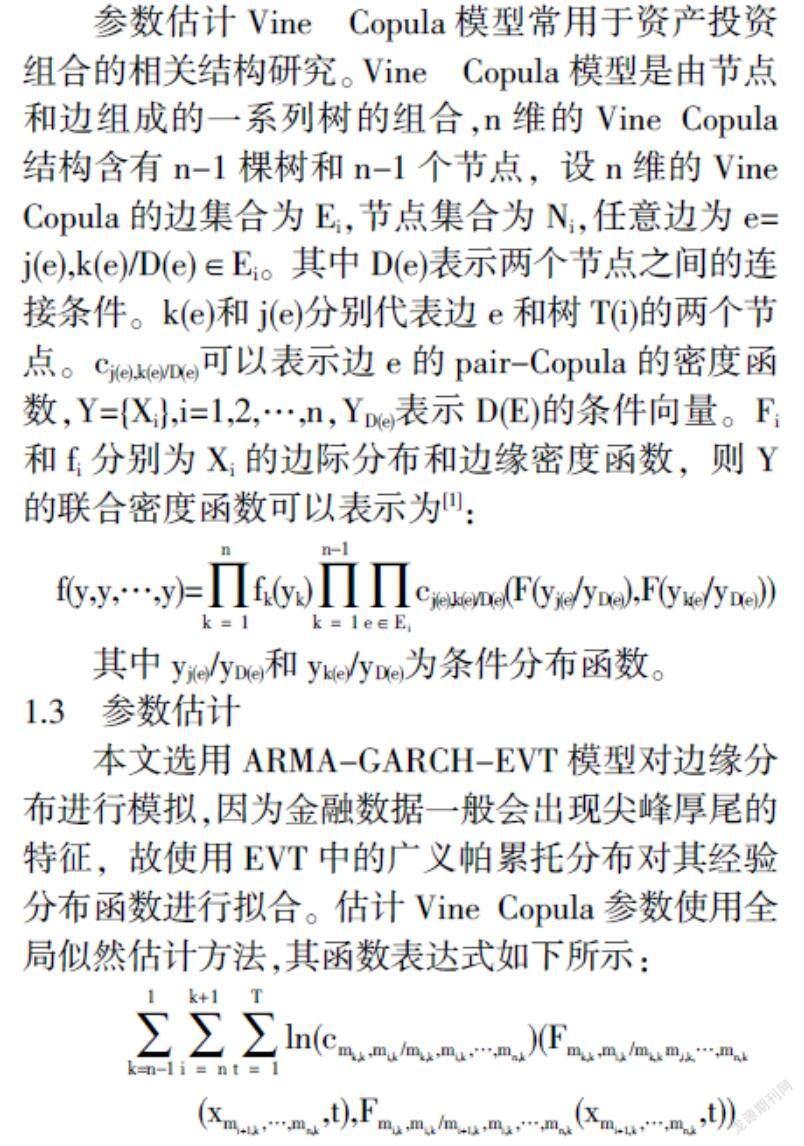
1 基于KNN算法的船舶操纵智能评估模型 在船员操纵航海模拟器的过程中,船舶操纵智能评估系统实时获取船舶操纵数据,操纵结束后船舶操纵智能评估系统计算出最终成绩。智能评估模型是评估系统的核心,建立科学、合理的评估模型是保证评估结果公平、准确的关键。本文提出的智能评估模型以数据为驱动,首先根据船舶操纵原理及专家经验建立评价指标体系;其次对船舶自动识别系统(automatic identification system,AIS)数据做预处理,并根据评价指标体系对数据进行进一步处理;再次以处理后的船舶数据为驱动求解各评价指标权重;最后根据K近邻(K-nearest neighbor, KNN)算法原理建立智能评估模型。智能评估模型建立之后,将待评估人员数据输入到模型接口,并处理成未标记的待评估样本集,利用已建立的KNN分类器处理待评估样本,求得此次评估的最终结果,即完成一次船舶操纵智能评估。
1.1 智能评估模型评价指标体系的建立
传统的评价指标体系建立的方法较多[4],如模糊综合评价法、层次分析法和专家经验法。基于传统方法建立的评估模型仍受评估员主观印象和专家经验的影响,没有真正实现船舶操纵智能评估。本文采用基于KNN算法的智能化综合评价[11]方法,其指标体系建立准则与传统方法的相同,都以保障船舶安全、高效和稳定运行为目标。
影响船舶操纵的因素众多,且有些因素难以量化,不适合用于智能评估,因此本文根据评价指标体系建立的准则和船舶操纵原理,提出航向、航向变化、航速、航速变化和船舶轨迹等5个评价指标。
1.1.1 评价指标的建立
1.5 KNN智能评估模型流程
智能评估模型以KNN算法为核心,对现有AIS数据分段、聚类处理后,根据建立的评价指标体系,对每个评价指标数据处理后得到未标记的样本集,利用变异系数法求解样本集中各个指标的权重,以目标函数为约束条件求解每个样本的目标值,将求解后的样本目标值进行离散、分类,并构建已标记基本样本集。智能评估模型的具体流程如下:
步骤1 判断待评估数据是否是被评估人员的数据,如果不是则进入步骤2,否则进入步骤9。
步骤2 判定待评估数据为原始样本数据,需对AIS原始数据按照操纵过程标准分类,采用DBSCAN对同一靠泊位置或抛锚位置的航迹进行聚类,并将聚类后的数据作为评估模型的基本样本集。
步骤3 建立航向、航向变化、航速、航速变化和船舶轨迹等5个指标组成的评价指标体系,并根据评价指标的数学描述处理基本样本数据。
步骤4 以经过处理后的样本数据构建未标记样本集。
步骤5 利用变异系数法处理各个评价指标数据,计算出各个评价指标的权重。
步骤6 根据多目标优化函数求解出每个样本的目标值,对结果进行排序,1、2、3、4分别代表优秀、良好、中等、及格。
步驟7 取已标记样本的80%作为训练集,未标记样本的20%作为测试集,测试KNN算法的精度。
步骤8 用求解后的结果构建已标记样本集,进入步骤10。
步骤9 判定待评估数据是被评估人员的数据,并重复步骤2、3、4,构建出待分类样本,然后进入步骤10。
步骤10 利用KNN算法对待分类样本进行分类,并根据分类标签得到评估结果。
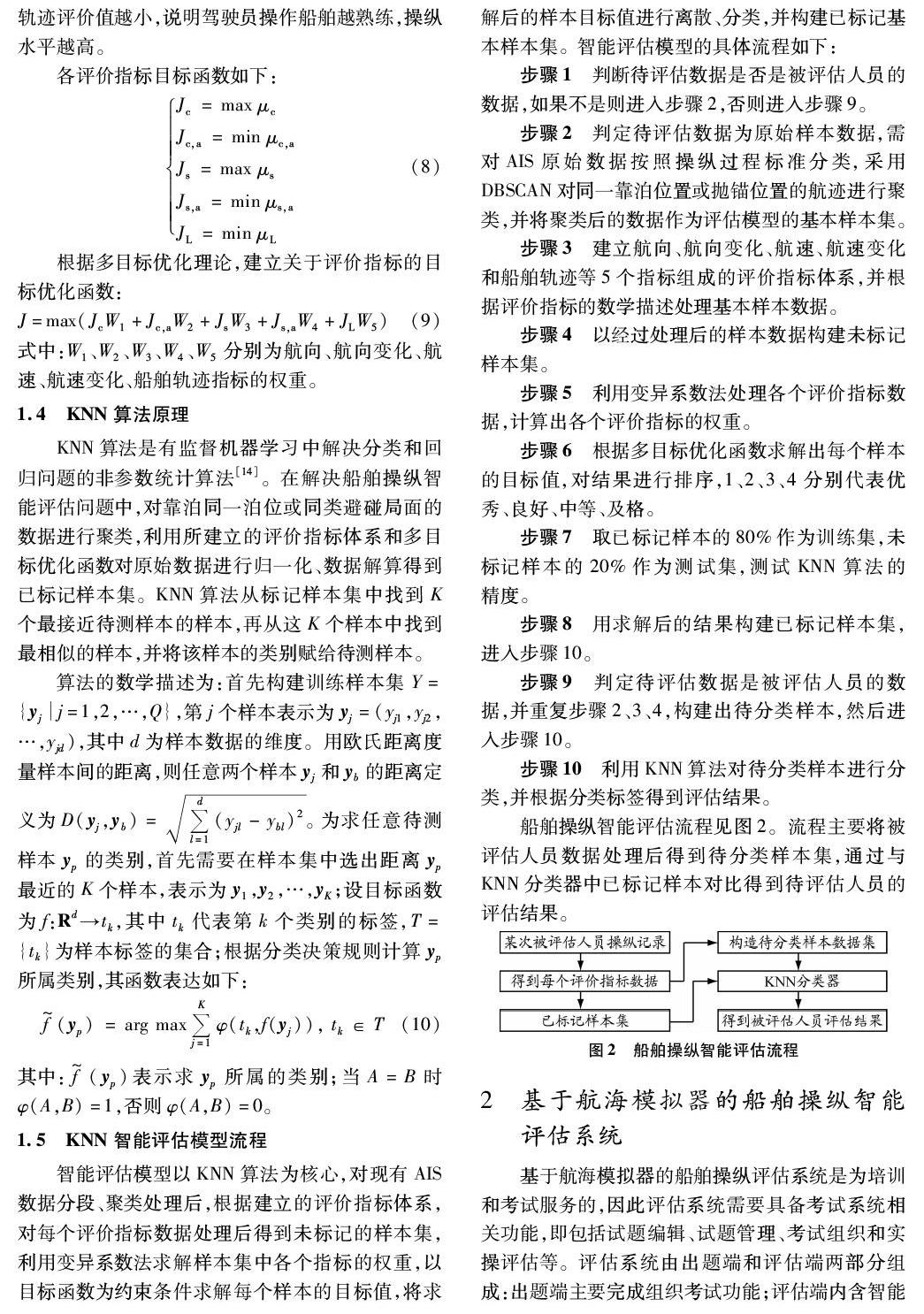
船舶操纵智能评估流程见图2。流程主要将被评估人员数据处理后得到待分类样本集,通过与KNN分类器中已标记样本对比得到待评估人员的评估结果。
2 基于航海模拟器的船舶操纵智能评估系统 基于航海模拟器的船舶操纵评估系统是为培训和考试服务的,因此评估系统需要具备考试系统相关功能,即包括试题编辑、试题管理、考试组织和实操评估等。评估系统由出题端和评估端两部分组成:出题端主要完成组织考试功能;评估端内含智能评估模型,对实操记录进行评价并给出最终考试成绩。船舶操纵智能评估系统架构见图3。
2.1 船舶操纵评估实例
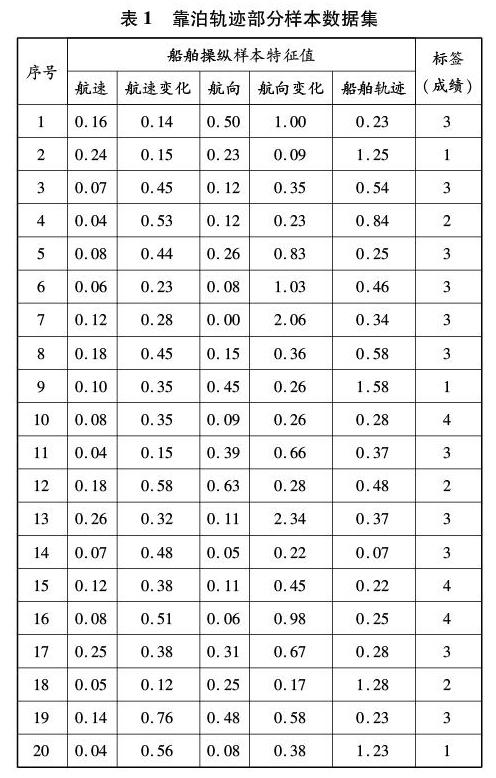
以天津港为例,对学员开展船舶靠泊操纵评估。首先提取100组靠泊天津港的船舶轨迹历史数据,根据评价指标体系和式(9)处理原始数据,求解模型,对求解后的目标值进行排序,并按照第1.5节中的步骤6定义的分类标签对成绩进行标记。样本处理后的部分数据见表1。
靠泊操纵的出题界面见图4。出题过程为:先从题库中选取靠泊天津港的试题;选择考生姓名、考试等级(船长、大副、二副和三副)及其他相关信息。在考生实际操船过程中,考生操作动作将被实时记录并保存到数据库中。
本次评估均采用离线评估模式。在考生操纵结束后,评估程序将根据存储到数据库中的操作记录,利用本文建立的KNN智能评估模型进行计算,得到考生成绩。考试成绩、各评价指标处理后的特征值及船舶运动曲线的显示见图5。
由图6可知,在考生操船过程中船舶基本沿计划航线航行,航速变化平稳,船舶轨迹比较平滑,但在靠泊最后阶段航向及靠泊位置稍有偏差。因此,图5中评估模型给出86.78分的成绩,与考生实际的操纵行为比较相符。
2.2 结果对比分析
为验证智能评估模型的有效性,分别采用KNN智能评估模型、模糊综合评价模型和专家评估方式给出20位考生靠泊操纵的结果,结果对比见图7。对比后发现,KNN智能评估模型、模糊综合评价模型与专家评估的结果基本一致。为进一步比较KNN智能评估模型与模糊综合评价模型的差异,分别用KNN智能评估结果、模糊综合评价结果与专家评估结果作差求取误差比例,结果见图8。由图8可知,KNN智能评估结果的误差基本都小于模糊综合评价模型的误差。
以上实验结果表明,使用KNN智能评估模型进行船舶操纵实操评估是可行的,在一定程度上KNN智能评估模型优于模糊综合评价模型,且智能评估模型不需要像传统评价模型那样设置一系列的隶属度参数,可极大地减少评估员的工作量,真正实现评估过程的自动化和智能化。
3 结束语
在传统航海模拟器船舶操纵评估模型的基础上,通过深入研究,提出基于KNN算法的智能评估模型,开发出船舶操纵智能评估系统,在大连海事大学自主研发的航海模拟器上进行多次测试。结果表明,智能评估系统的评估结果与专家评估结果基本一致,相比于模糊综合评价模型的结果更接近专家结果,能基本满足船舶操纵自动评估要求。
另外,该系统目前只能对船舶操纵进行评估,且智能评估模型的精度在一定程度上受到评价样本集的影响。今后的工作可从提高模型精度及解决船舶避碰自動评估的角度进行进一步研究。
参考文献:
[1] 王德龙. 船舶操纵避碰智能评估模型[D]. 大连:
大连海事大学, 2018.
[2] 陈锦标, 吴广宇, 应士君. 基于灰色模糊综合评估法的大型船舶模拟操纵评价[J]. 上海海事大学学报, 2008, 29(4):
1-5.
[3] 薛满福, 房希旺, 任鸿翔. 船舶靠泊操纵评估模型[J]. 中国航海, 2013, 36(3):
46-49.
[4] 王德龙, 任鸿翔, 赵月林, 等. 船舶操纵模拟器进出港操纵自动评估系统[J]. 大连海事大学学报, 2014, 40(2):
27-30.
[5] 王德龙, 任鸿翔, 肖方兵. 船舶操纵模拟器单船避碰自动评估系统[J]. 中国航海, 2015, 38(1):
44-48.
[6] 蒋效彬, 任鸿翔, 王德龙, 等. 航海模拟器的锚泊操纵自动评估系统[J]. 上海海事大学学报, 2016, 37(1):
82-86. DOI:
10.13340/j.jsmu.2016.01.015.
[7] 刘洋, 李铁山, 沈海青, 等. 基于VC的船舶操纵安全自动评估系统的开发[J]. 船海工程, 2017, 46(1):
181-184, 188. DOI:
10.3963/j.issn.1671-7953.2017.01.044.
[8] HUANG J C, NIEH C Y, KUO H C. Risk assessment of ships maneuvering in an approaching channel based on AIS data[J]. Ocean Engineering, 2019, 173:
399-414. DOI:
10.1016/j.oceaneng.2018.12.058.
[9] DUAN Zunlei, CAO Hui, REN Guang, et al. Assessment method for engine-room resource management based on intelligent optimization[J]. Journal of Marine Science and Technology, 2017, 25(5):
571-580. DOI:
10.6119/JMST-017-0710-1.
[10] NAGI A, MOHAMED D, ISMAIL E, et al. Risk assessment of LNG and FLNG vessels during maneuvering in open sea[J]. Journal of Ocean Engineering and Science, 2018, 3:
56-66. DOI:
10.1016/j.joes.2017.12.002.
[11] 杨勇. 智能化综合评价理论与方法研究[D]. 杭州:
浙江工商大学, 2014.
[12] 张玉玲, 迟国泰, 祝志川. 基于变异系数-AHP的经济评价模型及中国十五期间实证研究[J]. 管理评论, 2011, 23(1):
3-13. DOI:
10.14120/j.cnki.cn11-5057/f.2011.01.002.
[13] 赵梁滨, 史国友, 杨家轩. 基于DBSCAN算法的船舶轨迹自适应层次聚类[J]. 中国航海, 2018, 41(3):
53-58.
[14] 朱念芳, 林善明. 基于邻域KNN算法的风电功率短期预测模型[J]. 电测与仪表, 2017, 54(16):
20-24.
(编辑 贾裙平)
猜你喜欢评价指标算法例说算法初步中常见的易错点中学生数理化·高三版(2020年11期)2020-12-30Travellng thg World Full—time for Rree阅读与作文(英语初中版)(2019年8期)2019-08-27学习算法的“三种境界”中学生数理化·高一版(2017年1期)2017-04-25算法框图的补全中学生数理化·高一版(2017年1期)2017-04-25算法初步知识盘点中学生数理化·高一版(2017年1期)2017-04-25绿色商业模式理论与实证研究中国市场(2017年2期)2017-02-28基于人工神经网络的图书馆服务质量评价研究现代电子技术(2017年1期)2017-02-16职教集团的基本功能和内涵发展指标职教论坛(2016年25期)2017-01-07天然气冷热电三联供的应用探讨科技与创新(2015年7期)2015-05-05八五五农场玉米适宜性评价吉林农业·下半月(2014年3期)2014-04-30